Robotics : Mechanics&Control
Based on screw theory
Beginners, continuously updated …
INTRODUCE
Preliminary
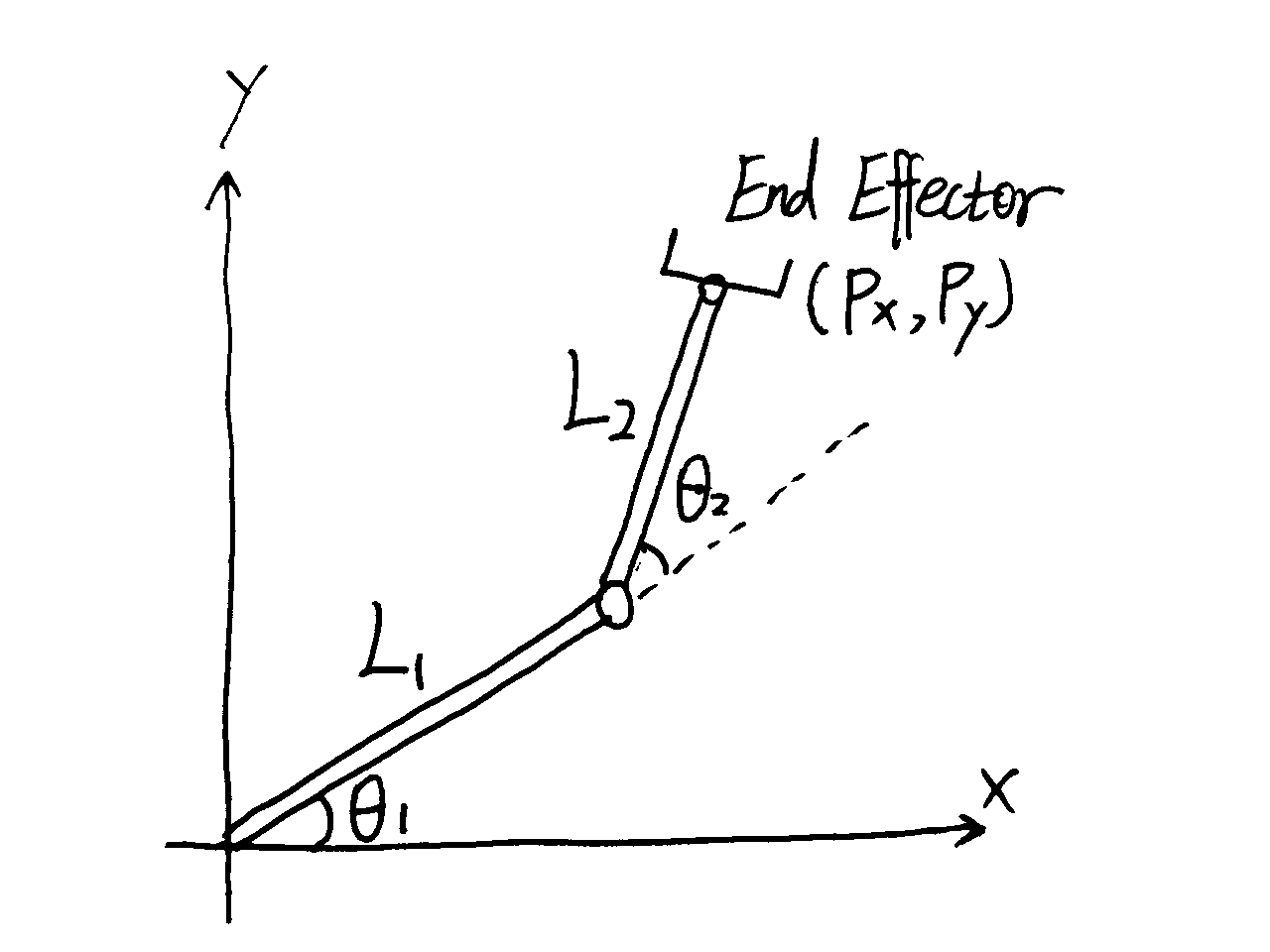
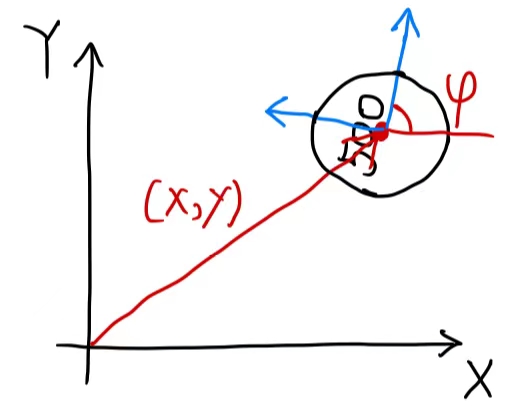
本课程介绍的很多概念都是以以下 2-link planar open-chain 为例:
且我们常记: \[ \frac{\partial{P_x}}{\partial{t}} = v_x \\ sin(\theta_1) = s1 \\ cos(\theta_1 + \theta_2)=c12 \\ \frac{\partial{\theta_1}}{\partial{t}} = \dot{\theta_1} \] 以此类推
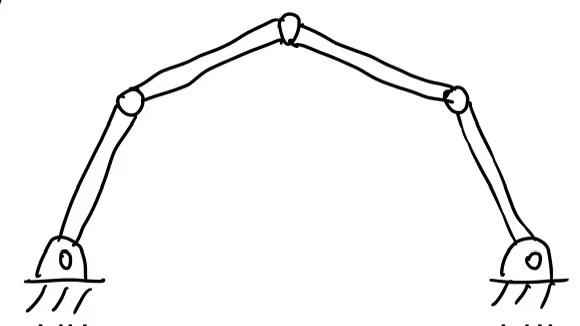
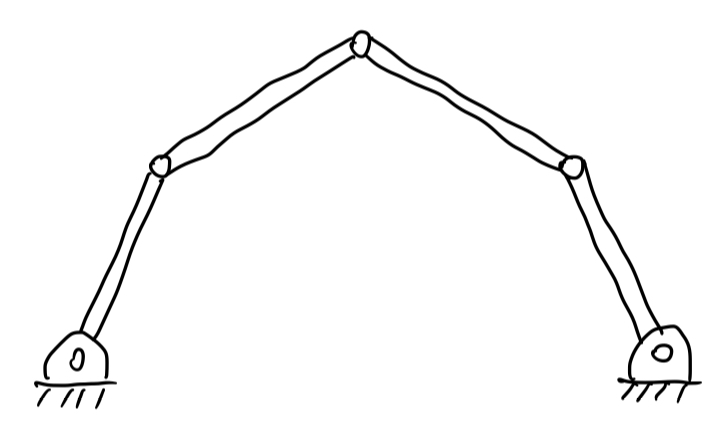
除了上述的 open-chain, 还有 close-chain:
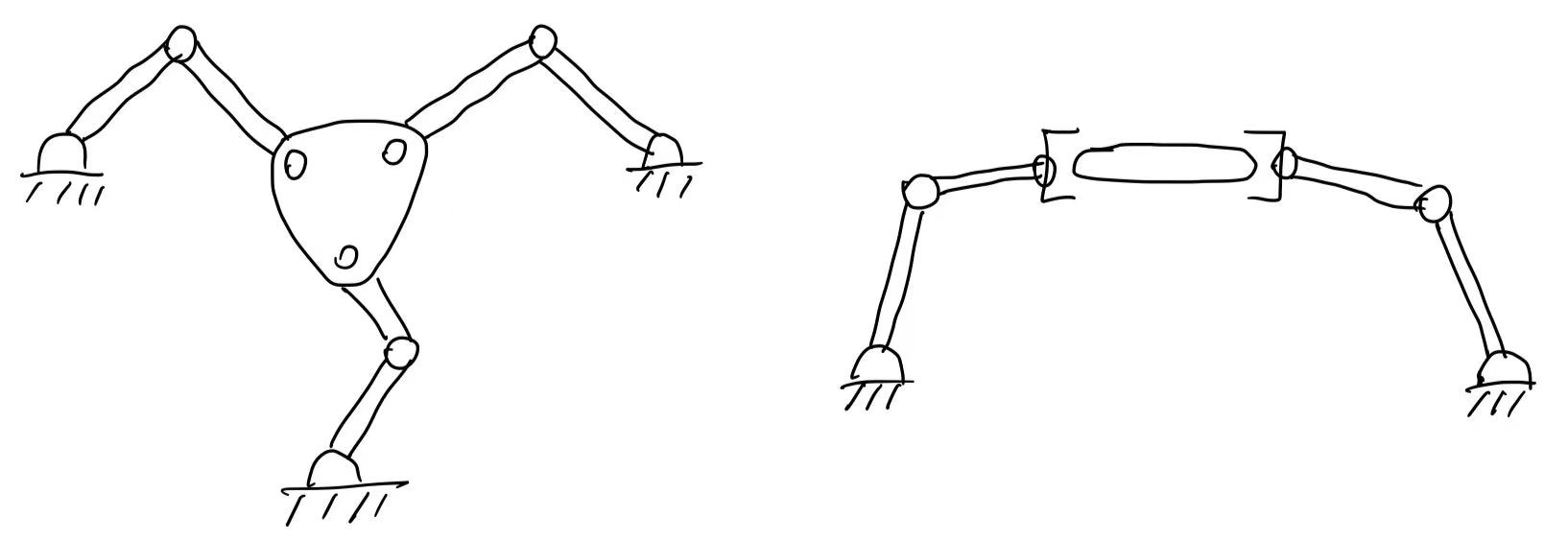
close-chain的雅各比矩阵奇异性非常有趣,我们后面会讲到。
Forward Kinematics
如2-link planar open chain图示,由\(\theta_1,\theta_2\)得到\(P_x,P_y\)就叫Forward Kinematics. \[ P_x=L_1 cos\theta_1 + L_2 cos(\theta_1 + \theta_2) \\ P_y=L_1 sin\theta_1 + L_2 sin(\theta_1 + \theta_2) \]
Inverse Kinematics
如2-link planar open chain图示,由\(P_x,P_y\)得到\(\theta_1,\theta_2\)的过程就是Inverse Kinematics.也就是解Forward Kinematics中的那个方程。
对于图示的2-link planar open chain 而言,解的数量最多有2个,而对于有些open chain,例如3-link,则解的数量可能有无数个(参照人手抓取物体)。
Jacobian Matrix & Singularity
我们控制机械臂去抓取某个坐标处的物体,肯定不是直接控制的\((\theta_1,\theta_2)\)的值,而是控制的\((\theta_1,\theta_2)\)其值的变化速率\(\frac{\partial{\theta}}{\partial{t}}\),从而控制\((P_x,P_y)\)的移动速率,从而控制End Effector向目标处移动。
则: \[ v_x = -L_1\; s1\; \dot{\theta_1} - L_2\; s12\; (\dot{\theta_1} + \dot{\theta_2}) \\ v_y = L_1\; c1\; \dot{\theta_1} + L_2\; c12\; (\dot{\theta_1} + \dot{\theta_2}) \] 即: \[ \begin{bmatrix} v_x \\ v_y \end{bmatrix} = \begin{bmatrix} -L_1\; s1 - L_2\; s12 & -L_2\; s12 \\ L_1\; c1 + L_2\; c12 & L_2\; c12 \end{bmatrix} \begin{bmatrix} \dot{\theta_1} \\ \dot{\theta_2} \end{bmatrix} \]
这个\(\begin{bmatrix}-L_1\; s1 - L_2\; s12 & -L_2\; s12 \\ L_1\; c1 + L_2\; c12 & L_2\; c12 \end{bmatrix}\)便叫做Jacobian Matrix \(J(\theta)\),Jacobian Matrix是向量对向量的一阶导。
根据上述公式,让我们思考一下:若\(\begin{bmatrix} \dot{\theta_1} \\ \dot{\theta_2} \end{bmatrix}\)持续固定值不变,则\(\begin{bmatrix} v_x \\ v_y \end{bmatrix}\)是否也会持续固定值不变,进而让End Effector沿着一个固定的方向一直运动下去呢?答案是否定的。因为虽然\(\begin{bmatrix} \dot{\theta_1} \\ \dot{\theta_2} \end{bmatrix}\)固定不变,但\(\begin{bmatrix} \dot{\theta_1} \\ \dot{\theta_2} \end{bmatrix}\)反映的是\((\theta_1,\theta_2)\)的变化率,前者只要非0,则在时间轴上,\((\theta_1,\theta_2)\)会变,\(J(\theta)\)跟着变,导致\(\begin{bmatrix} v_x \\ v_y \end{bmatrix}\)也变。而且一看图便知道,end effector有一个运动的范围,不会沿着一个方向不断运动下去。经过上述的思考,我们很容易想到,end effector的运动范围跟\(J(\theta)\)的性质有关。
那么,我们是否可以根据\(J(\theta)\)推测出end effector的运动边界?(一个半径为\(L_1+L_2\)的圆)我无法回答这个问题,因为我觉得\(J(\theta)\)是不断变化的,没有一个固定的值;没有一个固定的值,我暂时还没想到怎么算出\((L_1+L_2)\)的运动半径来。
但我觉得,可以回答这么一个问题:在什么情况下,end effector会到达它的运动边界?我仍然没想到如何单纯从\(J(\theta)\)的形式上推导出答案,但显而易见的是,我们一看图,就知道当\(\theta_2 = 0\)时,机械臂伸直了,end effector会运动到它的边界。此时\(J(\theta)\)刚好是奇异的,也就是\(det(J(\theta))\)的值为0,也就是\(J(\theta)\)的\(col_1\)和\(col_2\)向量的方向是重合的,且刚好与此时机械臂伸直的方向是相切的,即\(\begin{bmatrix} s1 \\ c1 \end{bmatrix}\)。
当前系统这个
- 机械臂伸直,end effector到达它的运动边界
- \(\theta_2 = 0\).
- \(J(\theta)\)为奇异阵
的状态,我暂且给它取一个名字,叫做“奇异态”。表面上来看,因为\(J(\theta)\)已经是奇异的了,两个列向量已经线性相关了,无论右乘向量\(\begin{bmatrix} \dot{\theta_1} \\ \dot{\theta_2} \end{bmatrix}\)如何变化,\(J(\theta)\)都会是奇异阵,系统都处于“奇异态”,但我们上文已经说过了\(\begin{bmatrix} \dot{\theta_1} \\ \dot{\theta_2} \end{bmatrix}\)只要非0,则随着时间t流逝,它会引起\(J(\theta)\)的变化,从而会破坏系统的“奇异态”。但其实,仅仅要\(\begin{bmatrix} \dot{\theta_1} \\ \dot{\theta_2} \end{bmatrix}\)非0还不足以破坏奇异态,因为假若\(\dot{\theta_2}=0\),即\(\theta_2\equiv 0\),此时 \[ \begin{bmatrix} -L_1\; s1 - L_2\; s12 \\ L_1\; c1 + L_2\; c12 \end{bmatrix} \equiv \frac{L_1+L_2}{L_2} \begin{bmatrix} -L_2\; s12 \\ L_2\; c12 \end{bmatrix} \] \(J(\theta)\)恒为奇异阵,系统恒为“奇异态”,end effector将绕原点做半径为\(L_1+L_2\)的圆周运动,运动方向为\(J(\theta)\)的列向量相同,即与\(\theta_1\)相切。
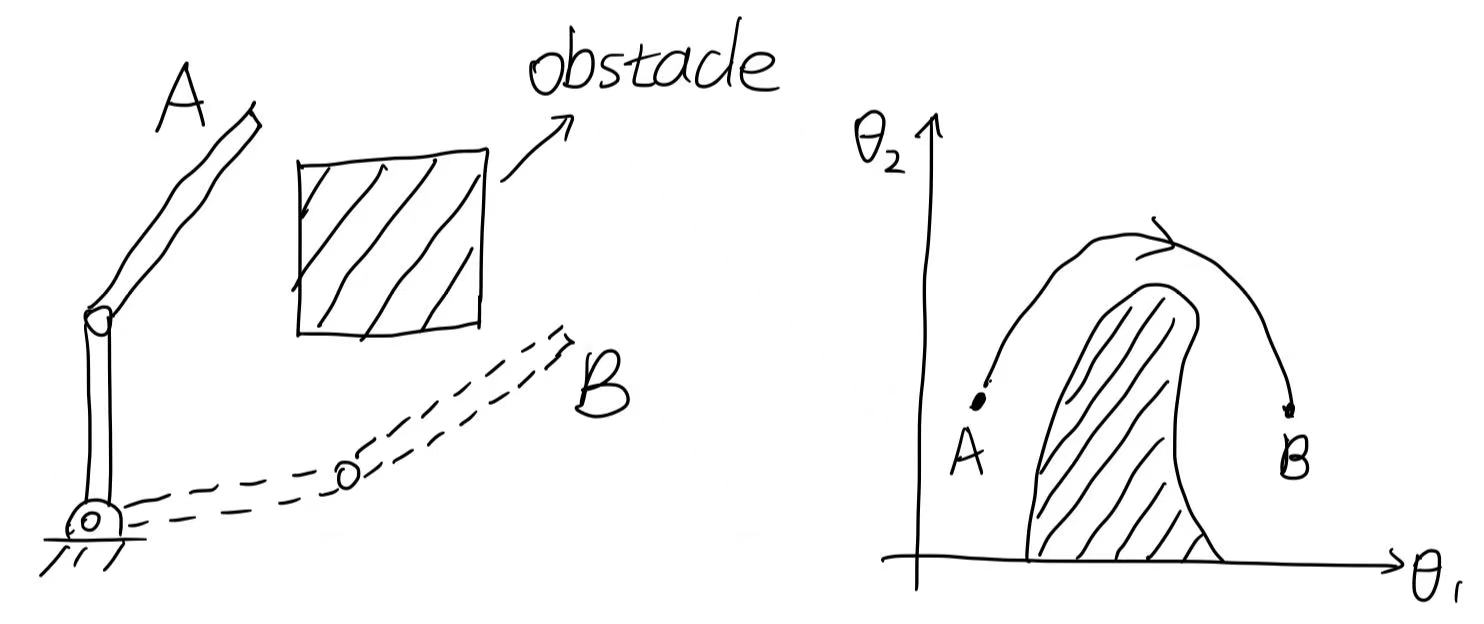
Planning using inverse kinematics
(EX1 begin)
(EX1 end)
Control
(EX1 begin)
(EX1 end)
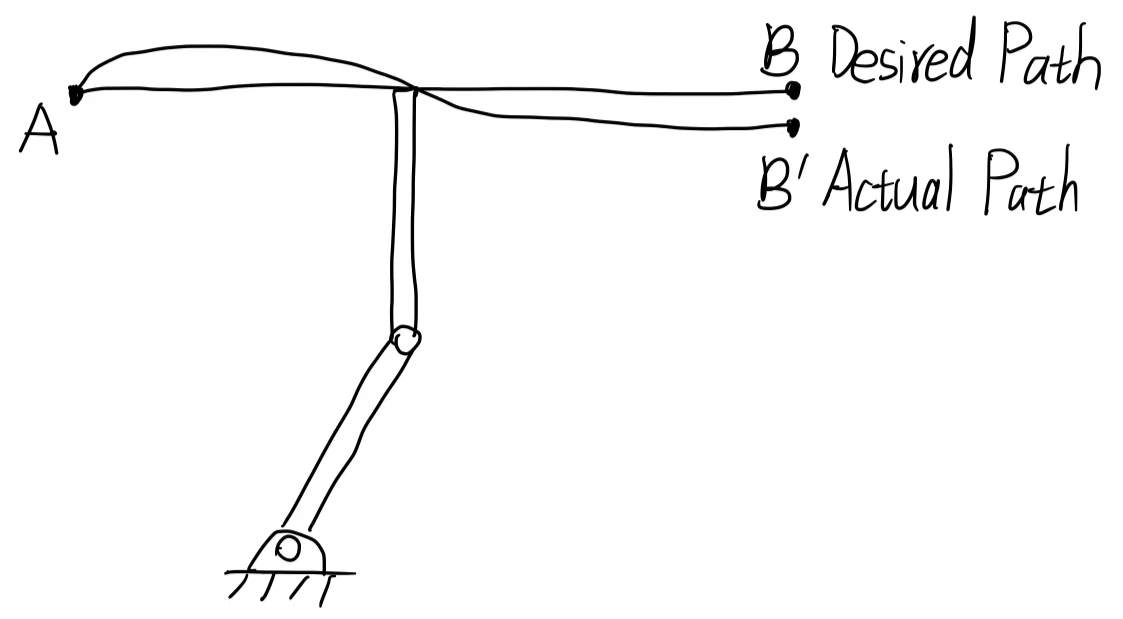
在上例中,desired path与actual path之间的误差就是control要解决的问题。引起误差的原因可能有:
- noise, disturbance
- kinematic parameter errors (比如我设计了一根杆子长1m,但制造出来后却长1.1m)
- modeling errors
- friction, elasticity, backlash
- other unmodeled errors
如何解决这些问题呢?就要用到feedback control
MOBILITY (DEGREE of FREEDOM)
Intro to DoF
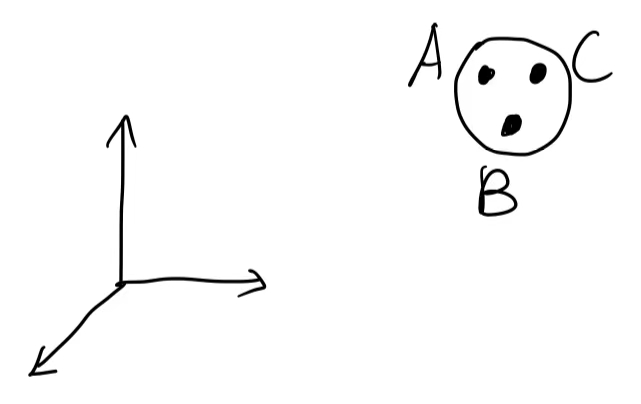
如何认识自由度?先举个例子:在桌子上唯一确定一个硬币的位置。
(EX1 begin)
Where is the coin? How to uniquely determine its position?
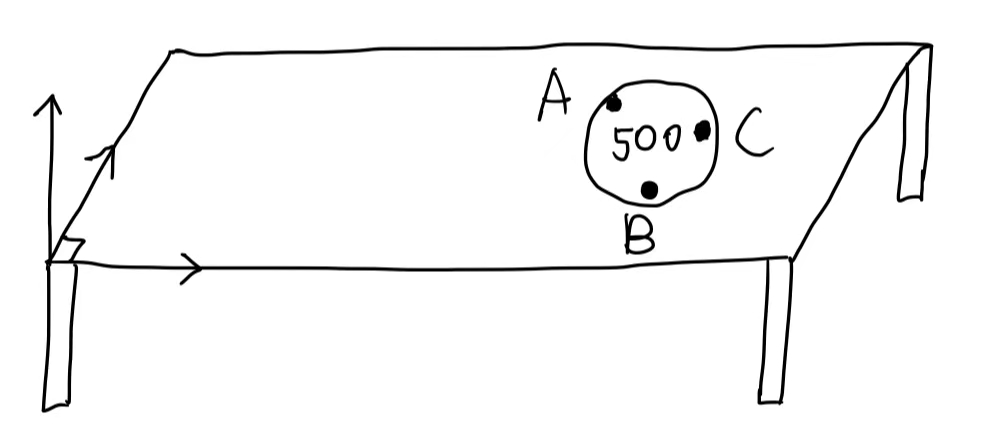
Solution 1, step by step:
- 选取一个参考系(图中已画出,左下桌角处)
- 在硬币上选取若干个点。只需要3个就够了,{A, B, C}。但对于这3个点,我们要设一定的限制,即两两点之间的距离(\(L_2\)范数)固定为{\(L_1, L_2, L_3\)}。即:
\[
d(A, B)=\sqrt{(x_A-x_B)^2+(y_A-y_B)^2}=L_1 (fixed) \\ d(B, C)=\sqrt{(x_B-x_C)^2+(y_B-y_C)^2}=L_2 (fixed) \\ d(A, C)=\sqrt{(x_A-x_C)^2+(y_A-y_C)^2}=L_3 (fixed)
\]
于是,我们有了3个等式,包含6个未知数。也就是说,我们要唯一确定该硬币在桌子上的位置,需要确定3个自由变量(6-3=3)。也就是说,唯一确定硬币在桌子上位置的参数里,有3个独立变量。
也就是说,如果(\(x_A, y_A\)), \(x_B\)被给定了,我们就可以算出\(y_B\), (\(x_C, y_C\))来。如下图所示: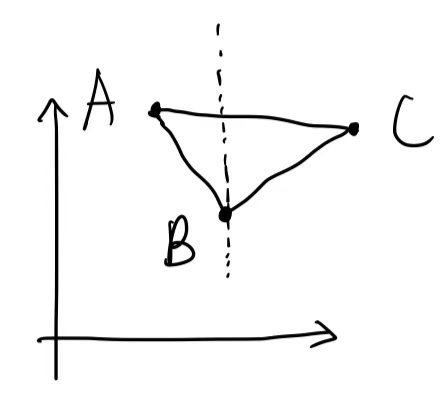
但实际上,上图只是理想情况,其实还有这里应该有两种解: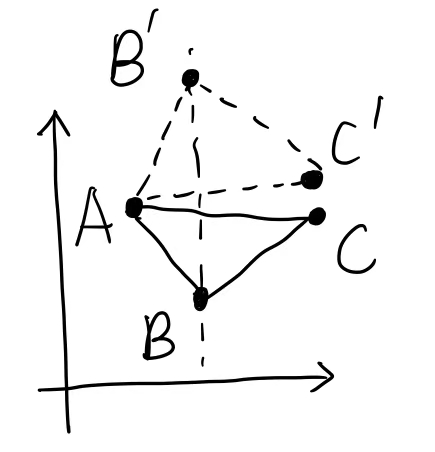
针对这种两种解的情景,我们用”reflection(反射)”去描述它,即上图中上下两个解互为镜像。所以在桌面上唯一确定coin的位置的时候,我们必须限定反射是不被允许的,我们必须舍弃掉”top-solution”。
Solution 2:
- 然而,上述的方法终究不够优美,我们有另一种更优美的办法来唯一确定桌面上的硬币位置:
(EX1 end)
上述的EX1考虑的是2D空间中刚体的自由度,现在我们考虑在3D空间中刚体的自由度。
(EX2 begin)
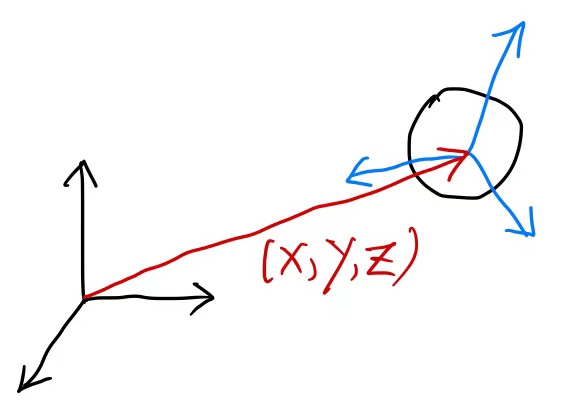
假设上图中3D空间中的问题还是一个coin,我们还是要唯一确定它在3D空间中的位置,则对于上图而言,硬币质心的位移参数我们已经知道: (x, y, z),那我们该如何确定硬币的朝向呢?也就是问,除了确定位移的3个参数外,我们该用多少个参数才能确定硬币的朝向呢?
我们仍然还是先按照Solution 1的方式来做,先在硬币上确定3个点,如图:
则有等式: \[ d(A, B)=\sqrt{(x_A-x_B)^2+(y_A-y_B)^2+(z_A-z_B)^2}=L_1 (fixed) \\ d(B, C)=\sqrt{(x_B-x_C)^2+(y_B-y_C)^2+(z_B-z_C)^2}=L_2 (fixed) \\ d(A, C)=\sqrt{(x_A-x_C)^2+(y_A-y_C)^2+(z_A-z_C)^2}=L_3 (fixed) \] 其中有3个等式,9个未知数,即6个自由/独立参数(9-3=6),而确定硬币位移用了3个参数,所以确定转向还需要用3个参数。
(EX2 end)
Mobility of Robot Mechanisms
现在介绍较复杂的机器人机械结构的DoF的计算。
首先介绍一些常见关节:
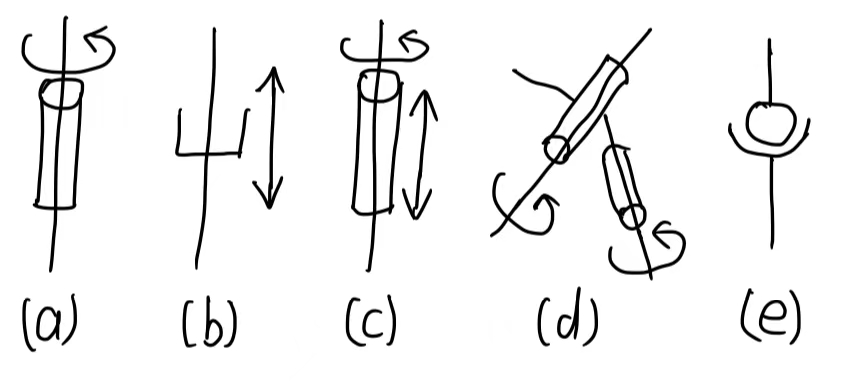
从左到右依次是:
- Revolute (R) joint, DoF=1
- Prismatic (P) joint, DoF=1
- Cylinderical (C) joint, DoF=2
- Universal (U) joint, DoF=2
- Spherical (S) joint, DoF=3
Planar Robot
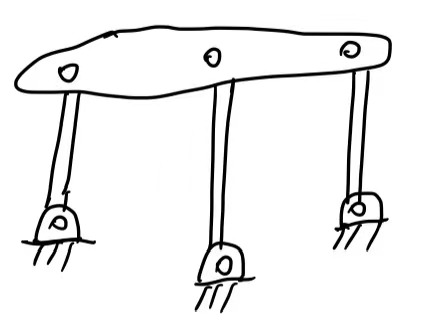
- 现在我们来考虑一个平面上的机器人,假设下图中椭圆形的是足:
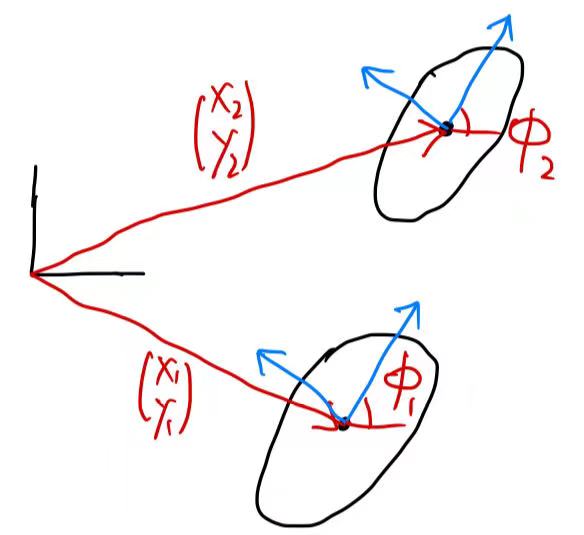
如果只考虑一条腿,则它的DoF=3
考虑两条腿的话,DoF=6
- 如果两条腿被用R关节铰接在一起:
则DoF=4
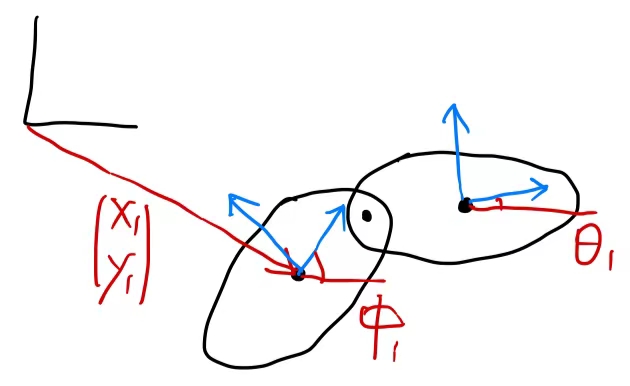
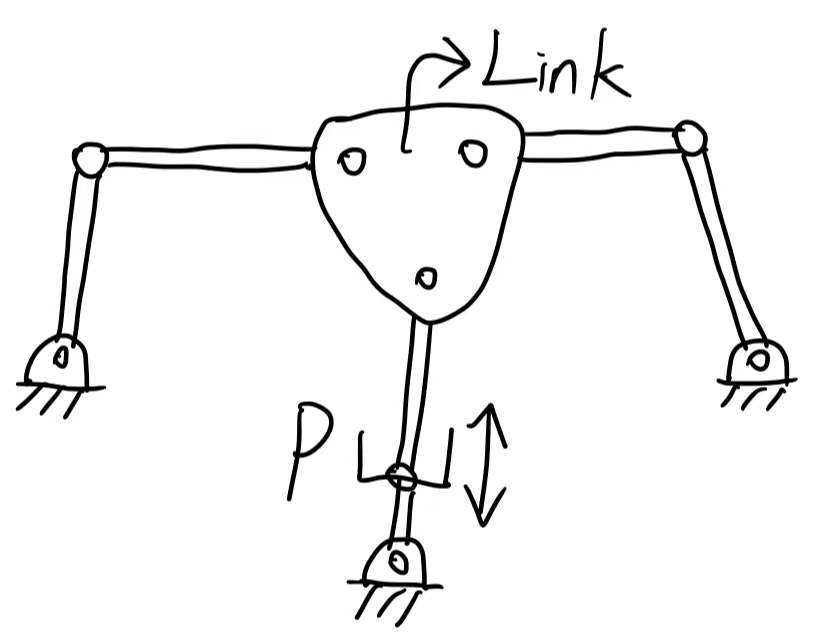
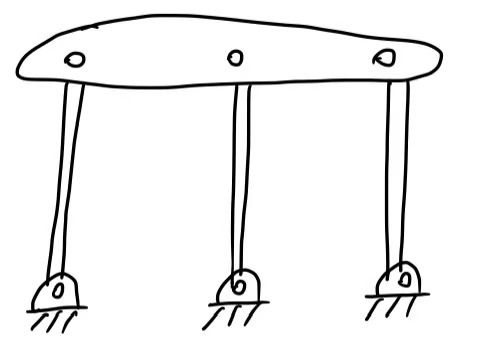
- 如果三条腿被用R关节铰接在一起:
则DoF=5,(\(x_1, y_1, \Phi_1, \Theta_1, \Theta_2\))
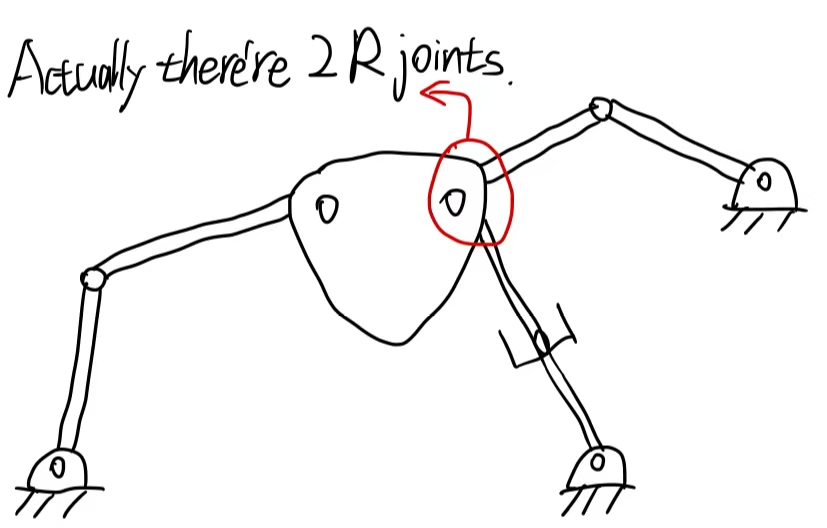
- 上述3张Planar robot的铰接用的都是DoF=1的R关节,假如我们用DoF=2的R+P联合关节呢?如下:
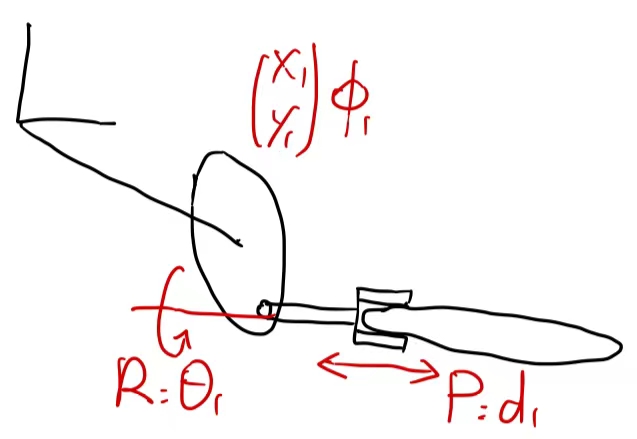
则DoF=5,(\(x_1, y_1, \Phi_1, \Theta_1, d_1\))
由上述例子,其实我们可以总结出一个计算DoF的公式,即Gruebler Formula (Planar Version): \[ N = \#~of~links~(including~ground) \\ J = \#~of~joints \\ f_i = DoF~of~joint~i,~i=1,…,J \\ DoF=3 (N-1) - \sum_{i=1}^{J} (3-f_i) = 3 (N-1-J) + \sum_{i=1}^{J} f_i \]
(EX1 begin)
DoF=3*(5-1-5)+5=2
这意味着如果我们固定住其中两个关节点,则整个结构都会被固定住
(EX1 end)
(EX2 begin)
N=8, J=9
DoF=3*(8-1-9)+9=3
(EX2 end)
(EX3 begin)
每个关节链接且仅链接两个Links/Bodies! 然而,每个Link可以链接超过两个关节。
DoF=3
(EX3 end)
(EX4 begin)
N=5, J=6, \(j_i\)=1
DoF=3*(5-1-6)+6=0
它居然不能移动!但是我们明显看上去这个结构是可以移动的啊?难道Gluebler公式出错了?是的,对于Gluebler公式来说,的确存在一些例外情况。但是在大多数情况下,Gluebler是正确的。例如,如果上述机械结构的3根Link不是等长的, Gluebler公式将会十分稳健,如下图所示,这个结构就是不能移动:
事实上,该结构中,3根link完全等长的情况在现实世界中是不存在的,所以从这种意义上来讲,Gluebler仍然是正确无误的。
(EX4 end)
Spatial Mechanism
对于3D空间中的Spatial Mechanism而言,同样有Spatial Version的Gluebler Formula: \[ DoF=6\dot (N-1)-\sum_{i=1}^J (6-f_i) = 6\dot (N-1-J)+\sum_{i=1}^J f_i \]
(EX1 begin) 这是一个6*UPS platform
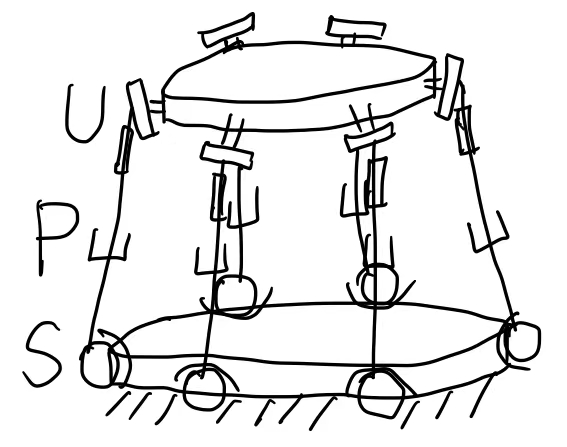
DoF=6(14-1+18)+6(3+2+1)=6
(EX1 end)
(EX2 begin) 这是一个3*UPS platform
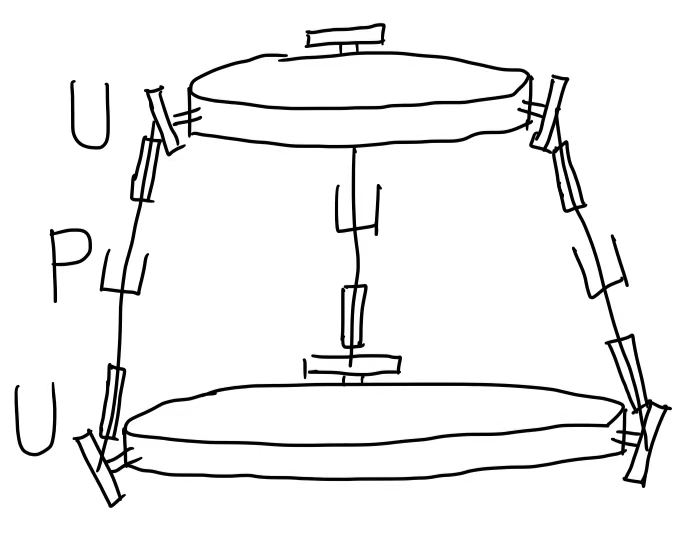
DoF=6(8-1-9)+35=3
“所以对于这个例子而言,你可以仅仅在3个Prismatic Joints处放置3个电机,就能控制整个平台的升降。并且如果你固定住任意3个joints,整个平台都动不了。”
“”里的说法看上去很对,但实际上是错的,因为DoF实际上不是3。没错,Gluebler又失效了。DoF实际上是5。上例中的机械结构实际上是一个奇异(singular)的机械结构,奇异的机械结构的DoF比Gluebler所计算的要多。
这种奇异(singular)的机械结构将会在讲close chain时详细论述。
(EX2 end)
Another Way to Understand Mobility (DoF)
上述通过几个例子从几何角度去理解自由度,并从中总结出了Glubler Formula。
其实还有另一种从代数角度理解DoF的方式。这种方式暂时不涉及到Glubler Formula。
下面也举几个例子说明这种理解方式。
(EX1 begin)
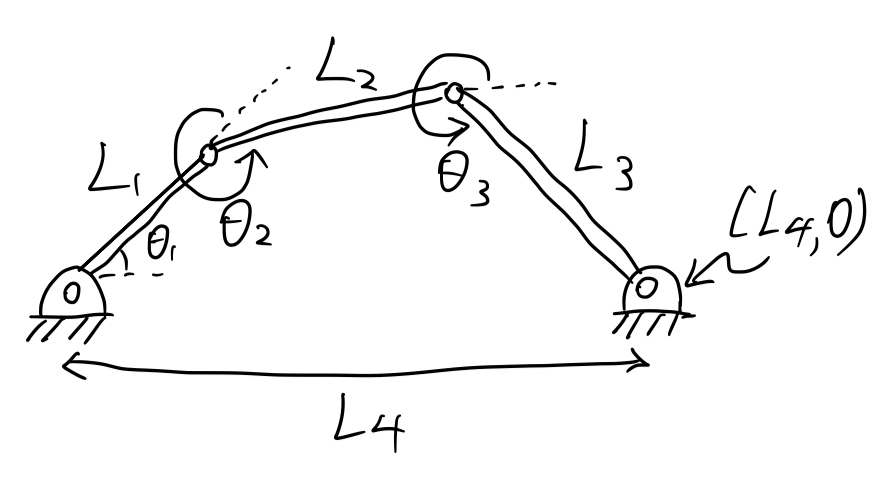
考虑到本例,这是一个平面上的3关节的 open chain,并且末端被固定在\((L_4, 0)\)。
就此,我们可以列出下列等式,以确定整个系统的状态:
\[ L_1 cos(\theta_1) + L_2 cos(\theta_1 + \theta_2) + L_3 cos(\theta_1 + \theta_2 + \theta_3)=L_4 \\ L_1 sin(\theta_1) + L_2 sin(\theta_1 + \theta_2) + L_3 sin(\theta_1 + \theta_2 + \theta_3)=0 \]
上述有2个等式,3个未知数,于是我们从线性代数的角度出发,可以说:“上述线性方程组有1个自由度,只要我们确定1个未知数的值,其他2个未知数也随之确定。也就是说,我们固定一个关节的角度,整个系统都会被固定住。于是系统的自由度是1。”
于是,我们可以直觉得出,上述线性方程组的可行解在其解空间中是一条线:
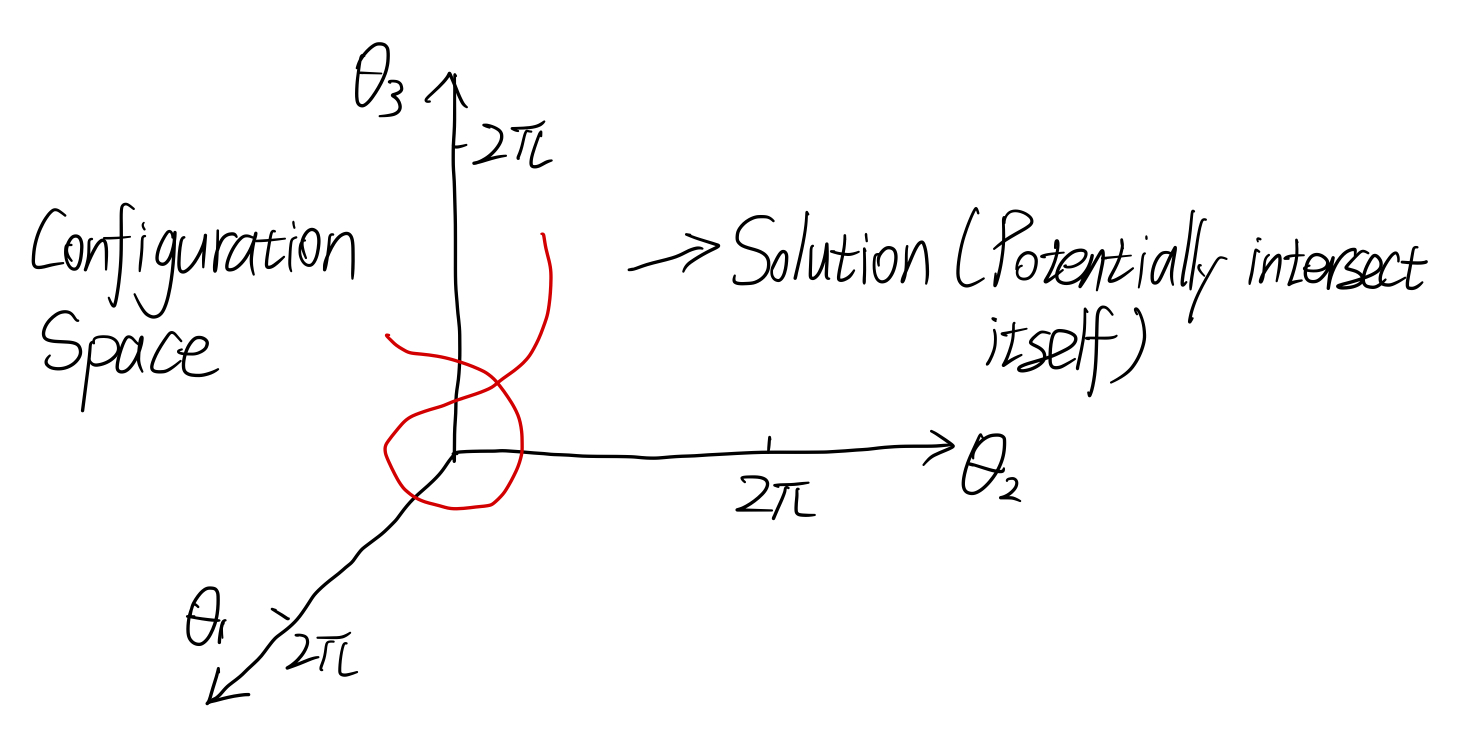
(EX1 end)
(EX2 begin)
又如对于此例EX2,如同EX1,你可以列出一个线性方程组来描述系统的状态,并且该方程组中有2个等式,4个未知数,于是系统DoF=2。
于是,我们可以直觉得出,此线性方程组的可行解在其解空间中是一个平面:
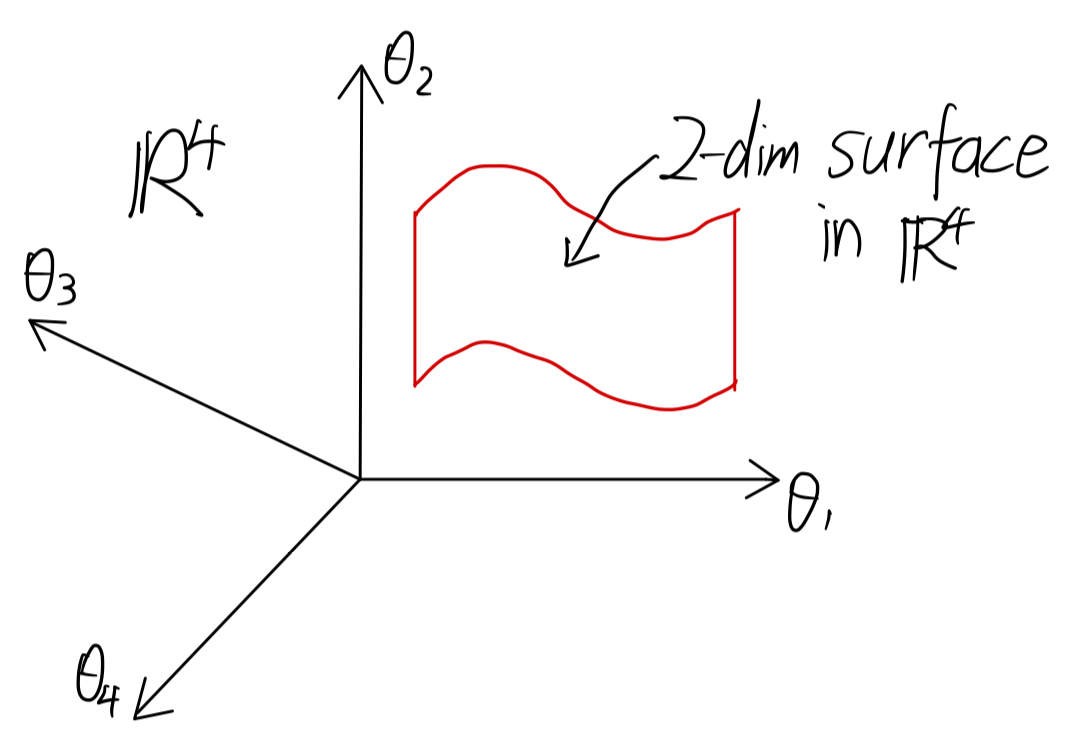
(EX2 end)
PLANAR GRASPING
Form and Force Closure
Introduce
这一节,我们引入 Form Closure 和 Force Closure 的概念。
在详细讲述这两个概念之前,我们线提两个 Motivating Example:
(EX1 begin)
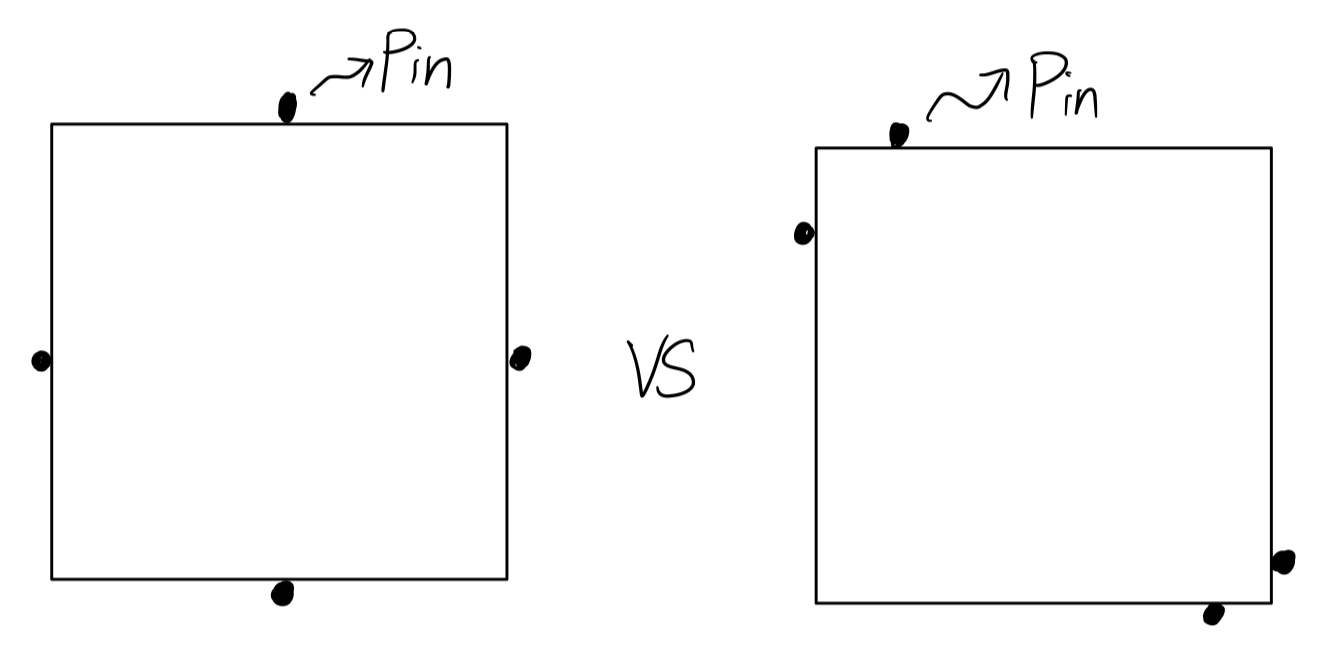
上图中的pins是无摩擦力的点接触 (frictionless point contacts),也就是抓取物体的接触点,但我们假设这里不存在摩擦力。请问,上图中,左边和右边两种抓取方式,哪种更好?
其实是右边的更好。
为什么?我们下文会解释到。
(EX1 end)
(EX2 begin)
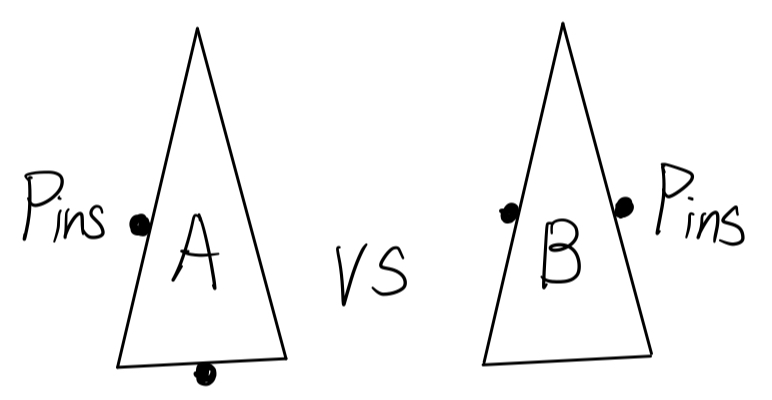
在这个例子中,我们假设 pins 是有摩擦力的。那么上图中左右两边哪种抓取方式更好?
还是右边的那种。我们在后面会揭开原因。
(EX2 end)
为了衔接上下文的教程,我们这里具体定义一下 Form Closure 和Force Closure:
- Form Closure:An object is completely immobilized by a set of point contacts.
- Force Closure:Fingers can apply forces to resist any external forces on object.
这里要额外注释一下:
- Form Closure指的是通过机械结构本身的几何形状来固定物体,使得物体无法在任何方向上移动或旋转。在Form Closure的情况下,物体被完全“锁定”,不依赖于抓取力的大小或方向。Form Closure的一个典型例子是将一个石块放入一个精确匹配的凹槽中,石块无法从凹槽中移动除非改变整个结构。参照EX1
- Force Closure则是指通过施加外力(如抓取力)来固定物体,即通过力的作用使物体在受力状态下无法移动。这种方式依赖于施加的力的大小和方向,以及力的分布是否能够平衡物体可能产生的任何运动。在Force Closure的情况下,即使物体的外形和抓取器不完全匹配,只要抓取器能施加足够的力,也能有效地固定物体。一个例子是用手抓住一个球:虽然球和手的形状不完全匹配,但通过手对球施加的压力,球可以被固定住。参照EX2
而在非理想现实中,我们遇到的实际情况都是Force Closure,于是Force Closure才是最重要的。所以下面的所有例子我们并不额外说明的话,都是只考虑Force Closure,也就是明知force的存在。但需要注意的时,有些时候,我们只考虑normal force的存在而假设friction不存在,关于这点详见下面“Contact Types”一节。
Contact Models
这里我们对Force Closure场景中 pins 与物体的接触做一个接触建模,以准确地描述Force Closure中的接触。
接触模型即如下图:
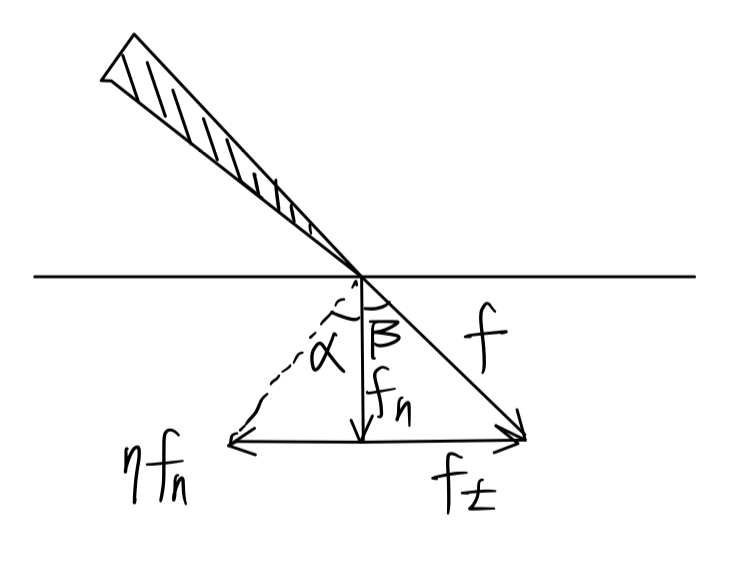
上图中,楔子就是Pin,它与物体接触。
这个接触看上去随时要滑动(slipping)一样,我们不希望它滑动。那么,滑动什么时候发生呢?答案是 \(\vert f_t \vert > \eta \vert f_n \vert\)。\(\eta\)是什么?\(\eta\)是Coulomb Friction Coefficient。
也就是说,滑动发生的充要条件是:\(\alpha < \beta,\; \alpha = tan^{-1} \mu\)
为了简化上述关于“滑动发生的充要条件”的表述,我们在接触模型,引入一个Friction Cone的概念:
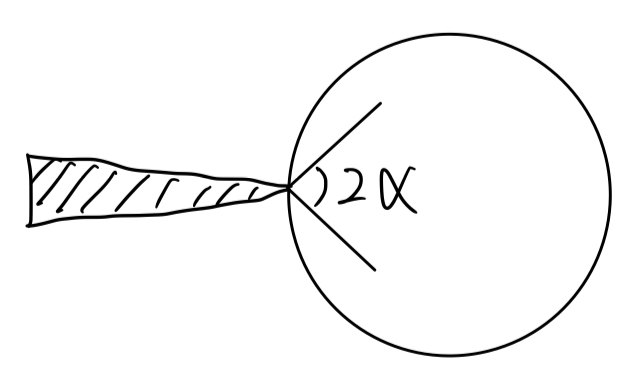
于是,滑动发生的充要条件是:Force is Outside the Friction Cone.
Contact Types
Contact可以被分为两类:
- Frictionless Point Contact:
- \(\alpha = 0\) or \(\eta = 0\)
- Only normal force can be applied
- Point Contact with Friction
- Force can only be applied inside the friction cone.
Static Equilibrium
一个物体受到外力(External Force, eg. grivaty)的影响,会移动,于是我们用手指去抓稳它,也就是让它静止(Stationary/Immobilized),于是手指就施加一群力到该物体上。
要是这时候物体静止了,我们就说物体达到了Static Equilibrium。
Static Equilibrium有没有数学上的描述?详见下面的例子:
(EX1 begin)
在这个例子中,我们假设不存在friction,于是所有接触都是frictionless contact,所有力都是normal force。
同时,在这个例子中,我们不定义外力External Force。
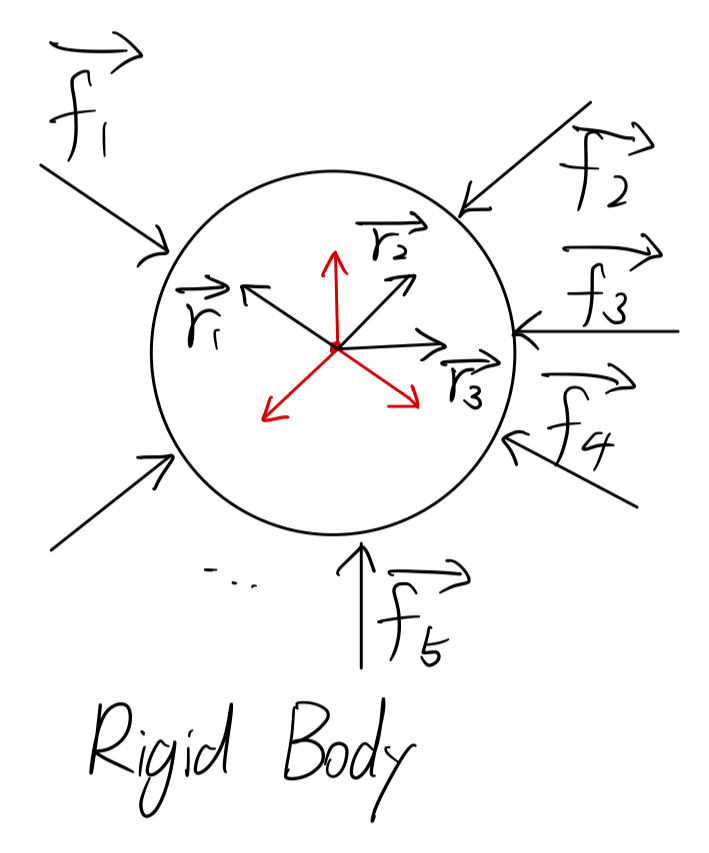
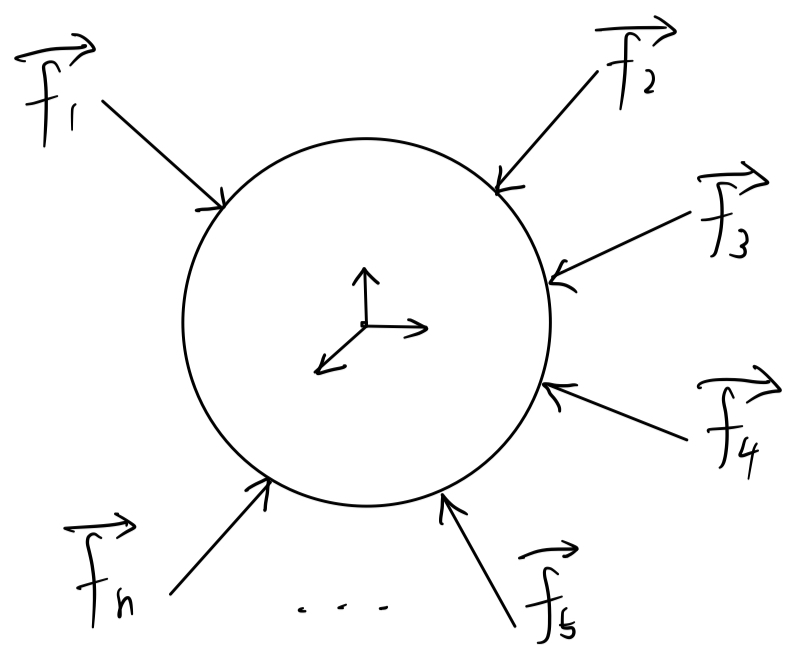
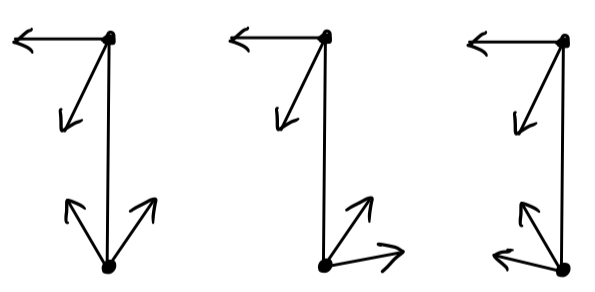
从高中知识来看,什么情况下该物体会静止?“大小相等方向相反”对吗?也就是\(\sum \vec{f_i}=0\)对吗?但这是不够的,因为高中阶段我们往往把受力平衡的问题简化为了质点。但当物体不是质点时,仅仅用上述公式去约束force,可能物体的确不会移动,但还是会旋转,看下图你就明白了:
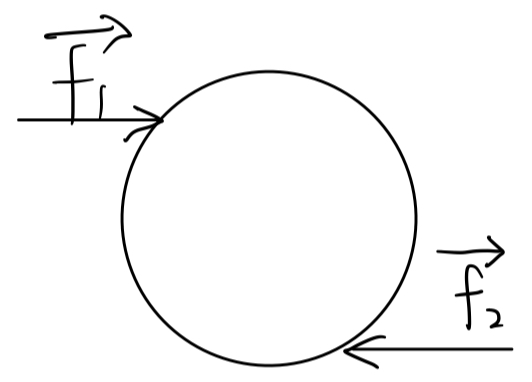
对于这张图而言,两个force中的任一个都会使得该物体顺时针旋转。而你能观察到的一个有趣的现象时,当只分析平面上的受力时,若一个力使得物体顺时针旋转,则该力的力矩(moment/torque)的z分量将是负数。力矩是什么?从物体质心为起点引一个向量到受力点来,设为\(\vec{r}\),则\(\vec{r} x \vec{f}\)即为力矩。
话归正题,为了使得本例中的问题达到Static Equilibrium,我们一共要给forces加上2条约束: \[ \sum \vec{f_i}=0 \\ \sum \vec{r_i} \times \vec{f_i}=0 \]
第一条平衡力,力之和为0防止位移。
第二条平衡力矩,力矩之和为0防止旋转。 </span>
我暂时不知道这组公式叫什么名字,我暂且称之为”Static Equilibrium 方程组”。
(EX1 end)
为了进一步深入了解分析Static Equilibrium 方程组,我们将上述EX1简化成下面的EX2,并分析:
(EX2 begin)
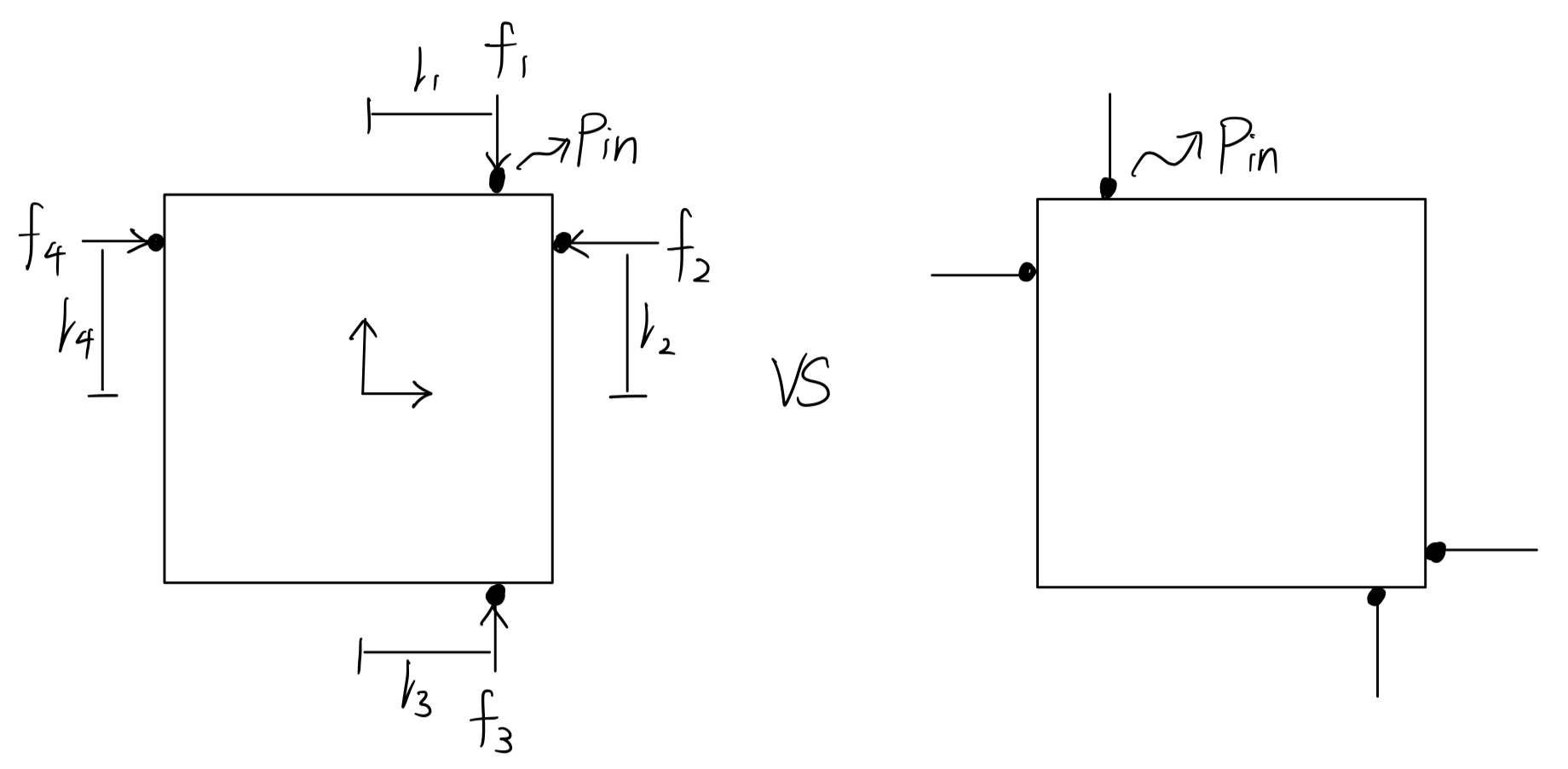
在这个例子中,我们仍然假设不存在friction,于是所有接触都是frictionless contact,所有力都是normal force。
在这个例子中,假设外力External Force被引入了,则物体仅在下列式子成立时达到static equilibrium:
\[ \sum_{i=1}^n \vec{f_i}+\vec{f_{ext}}=0 \\ \sum_{i=1}^n (\vec{r_i} \times \vec{f_i}) + \vec{r_{ext}} \times \vec{f_{ext}}=0 \]
在本例中,n=4,且: \(f_1 = \begin{bmatrix} 0 \\ -x_1 \end{bmatrix}\), \(f_2 = \begin{bmatrix} -x_2 \\ 0 \end{bmatrix}\), \(f_3 = \begin{bmatrix} 0 \\ x_3 \end{bmatrix}\), \(f_4 = \begin{bmatrix} x_4 \\ 0 \end{bmatrix}\)。
并且,我们约束\(x_i \geq 0\),这意味着force只能推(push),不能拉(pull)。这种约束想想也是合理的,毕竟每个force都可视作于一根手指按在物体上,你指尖按上去了肯定只能给到压力啊,肯定只能推啊,拉不了。
对于Static Equilibrium方程组第一式,在本例中可以具体为: \[ \begin{bmatrix} -x_2+x_4+f_{ext,x} \\ -x_1+x_3+f_{ext,y} \end{bmatrix}= \begin{bmatrix} 0 \\ 0 \end{bmatrix} \]
对于Static Equilibrium方程组第二式,在本例中可以具体为: \[ \vec{r_1} \times \vec{f_1} = \begin{bmatrix} -l_1 \\ 0 \\ 0 \end{bmatrix} \times \begin{bmatrix} 0 \\ x_1 \\ 0 \end{bmatrix} = \begin{bmatrix} 0 \\ 0 \\ -l_1 x_1 \end{bmatrix} \; , \; . \;\; . \;\; . \;\; \\ \Rightarrow \begin{bmatrix} 0 \\ 0 \\ -l_1 x_1 + l_2 x_2 + l_3 x_3 - l_4 x_4 \end{bmatrix} = \begin{bmatrix} 0 \\ 0 \\ -m_{ext,z} \end{bmatrix} \]
有趣的是,观察第二式中的\(-l_1 x_1 + l_2 x_2 + l_3 x_3 - l_4 x_4\),我们可以发现,\(f_1 \& f_4\)造成了物体顺时针旋转,所以它们的符号是负的,\(f_2 \& f_3\)造成了物体逆时针旋转,所以它们是正的。
言归正传,整合一式和二式,可以得到一个\(Ax=b\)的形式:
\[ \begin{bmatrix} 0 & -1 & 0 & -1 \\ -1 & 0 & 1 & 0 \\ -l_1 & l_2 & l_3 & -l_4 \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \\ x_3 \\ x_4 \end{bmatrix} = \begin{bmatrix} -f_{ext,x} \\ -f_{ext,y} \\ -m_{ext,z} \end{bmatrix} \]
我来注解一下上述的\(Ax=b\)式子:
- 为达到Static Equilibrium,需要被平衡的是“力”+“力矩”
- 在本例中,所有力,包括外力和手指施加的力,被分解成了沿\(x\)和\(y\)的两个分量
- 在本例中,由于所有力都在2D平面内,所以力矩的方向只有一个,即\(z\)轴
- \(x\)代表的是手指施加给物体的每个力和力矩的大小。本例中一共4个力,故\(x\)长度为4
- \(b\)代表的是手指需要对抗的外力,它分为“力”和“力矩”两部分。上面一部分(在本例中是\(-f_{ext,x},-f_{ext,y}\))是外力在\(x\)和\(y\)两个方向上的分量,代表需要被平衡的“力”。下面一部分(在本例中是\(-m_{ext,z}\))是外力的力矩,代表需要被平衡的“力矩”
- \(A\)按Row也分为“力”和“力矩”两部分,上面两个Row分别代表4个手指力在\(x\)和\(y\)两个方向上的分量,下面一个Row代表4个手指力在\(z\)方向上的力矩分量。但注意,\(A\)中的数值只代表力和力矩的方向,真正决定力和力矩大小的是\(x\)
- \(A\)按Column来分,每个Column都代表一个手指力在\(x\),\(y\)方向上的力分量,以及在\(z\)方向上的力矩分量。但注意,\(A\)中的数值只代表力和力矩的方向,真正决定力和力矩大小的是\(x\)
- \(A\)有多少个Column,就有多少个手指在抓取
考虑\(Ax=b\),如果对于任意\(b \in \mathbb{R}^3\),都存在一个可行解\(x \in \mathbb{R}^4\),那么物体就能保持静止,也就是形成Form Closure
再次提醒,对于我们这里的例子而言,\(x_i \geq 0\)
那么,当\(A\)长成什么形状时,上例可现成一个Form Closure呢?
我们先来考虑一个简化的情况,我们假设物体为质点,也就是不考虑力矩了,则\(Ax=b\)可以被简化为:
\[ \begin{bmatrix} 0 & -1 & 0 & -1 \\ -1 & 0 & 1 & 0 \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \\ x_3 \end{bmatrix} = \begin{bmatrix} -f_{ext,x} \\ -f_{ext,y} \end{bmatrix} \]
即:
\[ x_1 \vec{a_1} + x_2 \vec{a_2} + x_3 \vec{a_3} = \vec{b} \]
对于该式,有“总是有解”和“总是无解”两种情况:
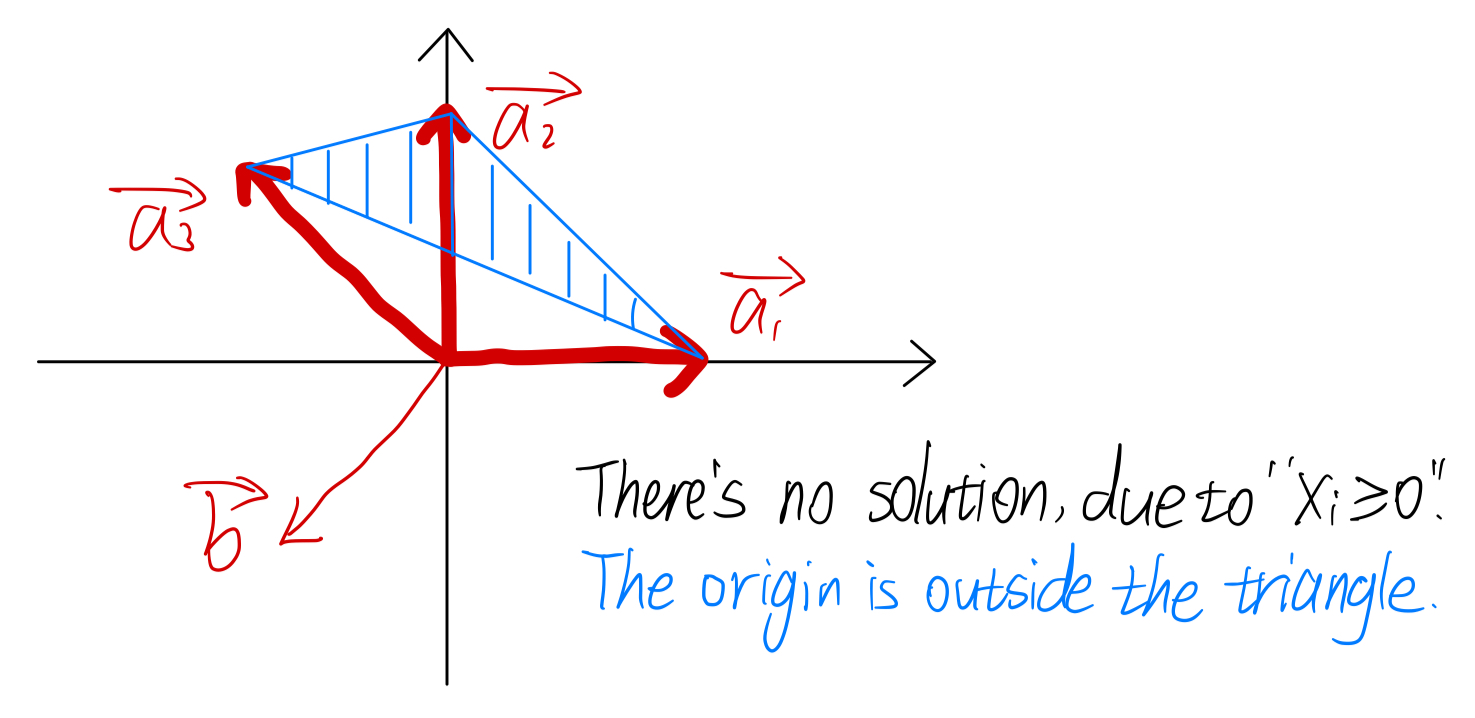
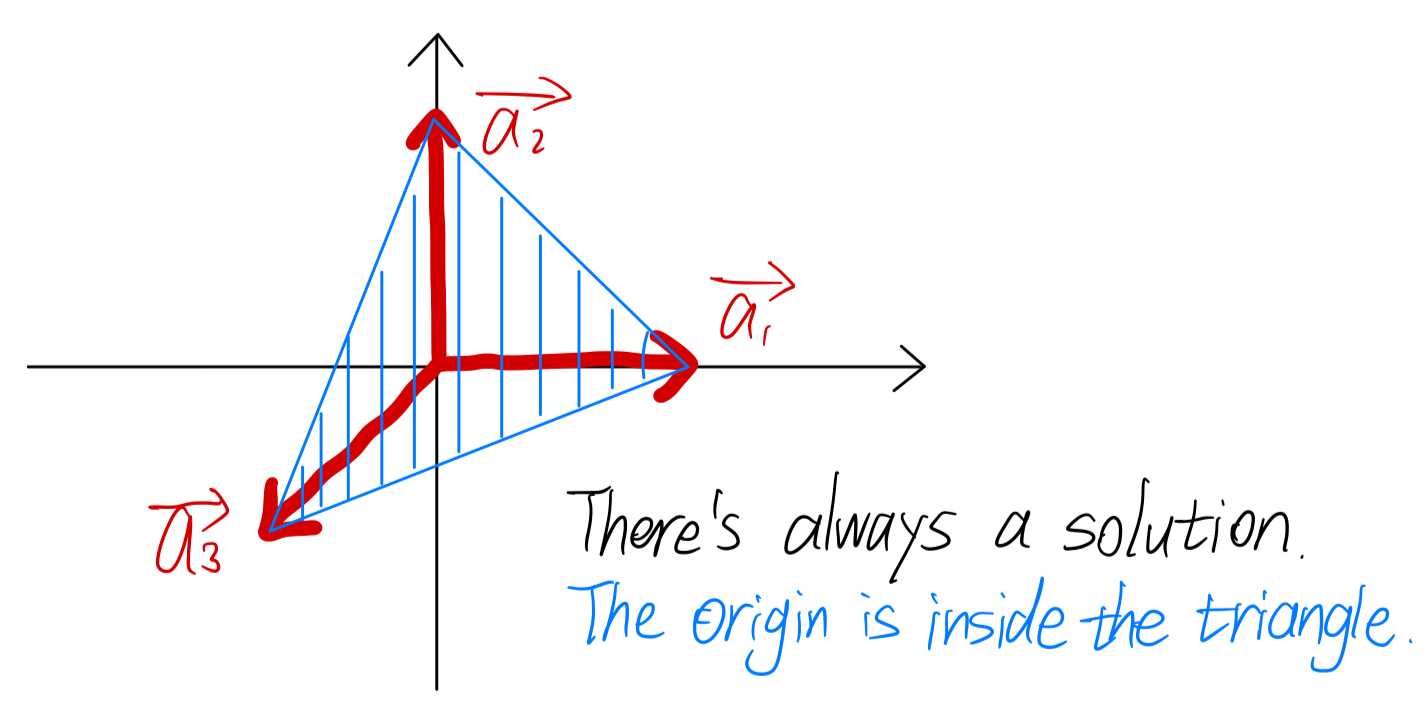
可以看出对于总是有解的情况而言,A的列空间的原点在列向量所现成的tetrahedron之中。换种说法是:“在\(x_i \geq 0\)的条件下,\(A\)的列向量能张成整个向量空间。”
所以对于
\[ \begin{bmatrix} 0 & -1 & 0 & -1 \\ -1 & 0 & 1 & 0 \\ -l_1 & l_2 & l_3 & -l_4 \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \\ x_3 \\ x_4 \end{bmatrix} = \begin{bmatrix} -f_{ext,x} \\ -f_{ext,y} \\ -m_{ext,z} \end{bmatrix} \]
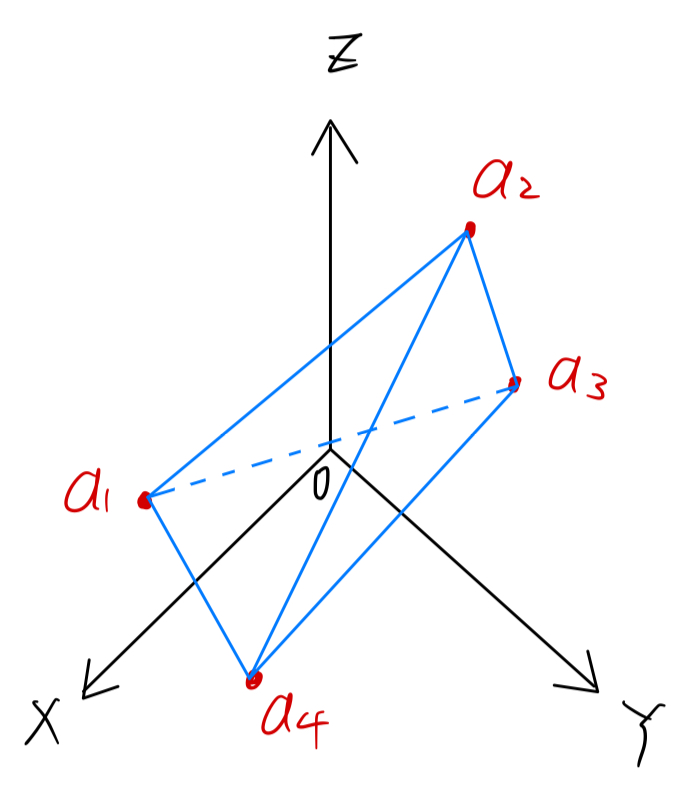
,A的列空间的原点也应该在列向量所现成的tetrahedron之中。既:
(EX2 end)
承接上例,我们进一步假设\(l_1=l_2=l_3=l_4=0\),则tetrahedron就会变成一个square,不再是一个tetrahedron。我们本来需要一个立体空间包住原点,但现在只剩下一个平面area。所以在这种情况下,没有解,原点不在tetrahedron中,没有Form Closure。
更具体来说,几乎没有\(b\)能在这个平面area向量空间中找到它对应的解。
事实上,这种\(l_1=l_2=l_3=l_4=0\)的情况就是下图左边这种情况:
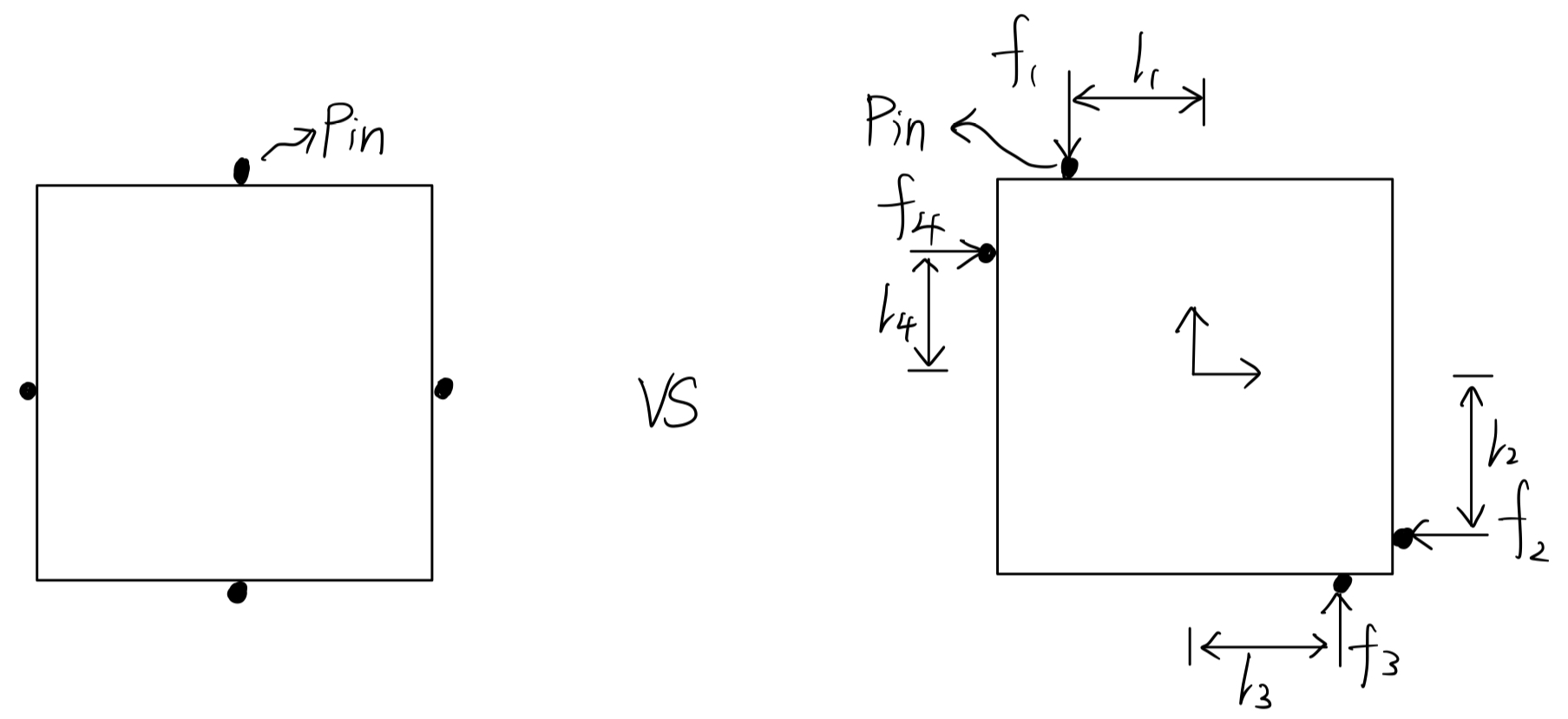
于是我们就可以回答本章Intro小节motivating example中的问题,上图中左右两边哪一种更好?也就是哪一种更能抵抗外力?当然是右边的。
需要注意的是,上图中没有摩擦力,所以力只能朝着接触面的正交方向。并且我们简化了这里的力,它只能push,所以\(x_i \geq 0\)。也就是说对于\(f_1 = \begin{bmatrix} 0 \\ -x_1 \end{bmatrix}\), \(f_2 = \begin{bmatrix} -x_2 \\ 0 \end{bmatrix}\), \(f_3 = \begin{bmatrix} 0 \\ x_3 \end{bmatrix}\), \(f_4 = \begin{bmatrix} x_4 \\ 0 \end{bmatrix}\),\(x_i \geq 0\),不能pull。
Judge Ax=b Solvable
在上节中,我们将Static Equilibrium方程组简化为了\(Ax=b, x_i \geq 0\),并通过对于任意b是否能找到一个解x来判断A描述的抓取状态是否现成一个Form Closure。
那么,我们是如何判断对于任意b是否有解x的呢?我们说:“A的列空间的原点应该被A的列向量围成的tetrahedron包住”。
但事实上,这个描述并不够正式,我们有更正式的描述:
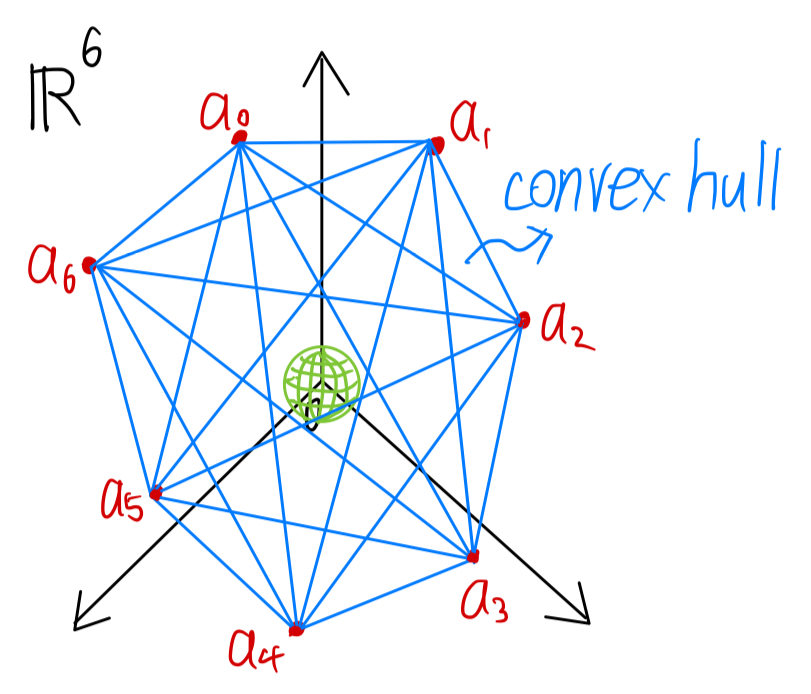
考虑\(Ax=b, A \in \mathbb{R}^{m\times n}, b \in \mathbb{R}^m, x \in \mathbb{R}^n, x_i \geq 0\),对于任意b,存在一个解x的充分必要条件是:在\(\mathbb{R}^m\)中存在一个以原点为中心的open ball,落在A的列向量所现成的convex hull的中心。
这里就有一个概念了,convex hull是什么?
(EX1 begin)
对于下图而言,有3个\(\vec{a_i}\),convex hull是一个三角形:
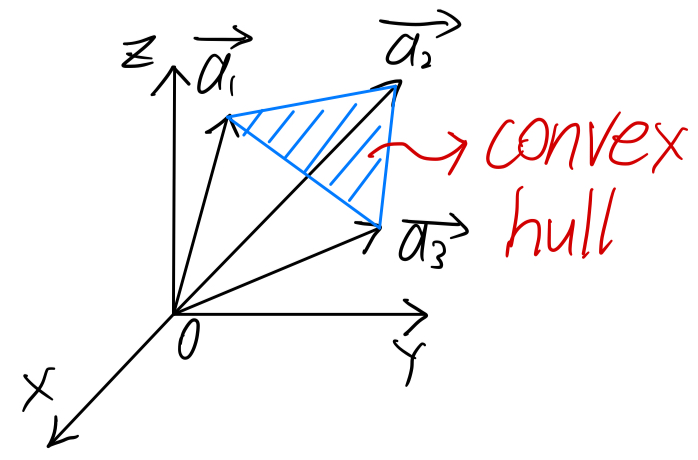
(EX1 end)
(EX2 begin)
对于下图而言,有4个\(\vec{a_i}\),convex hull是一个tetrahedron,你可以看到一个open ball落在A的列向量围成的convex hull里:
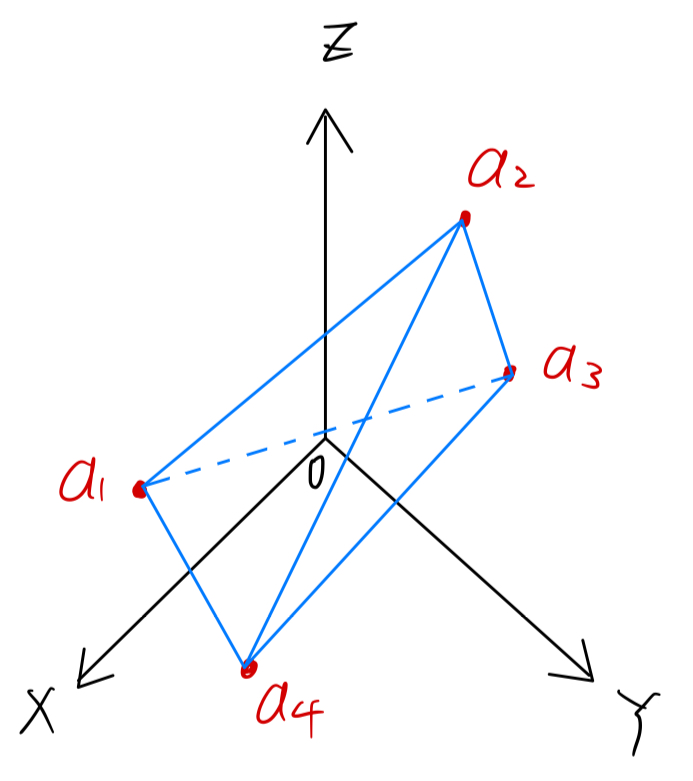
(EX2 end)
同样我们根据上例可以总结出两点:
- 对于平面抓取而言,若假设没有摩擦力,则至少4个frictionless point contact是必须的,如EX2。不然,要是只有3个contact point,则会变成EX1,不可能有open ball存在convec hull中的。
我们这里可以再扩展一下,对于3D空间抓取而言,至少需要几个frictionless point contact?我们来列出它的Static Equilibrium方程组,看看一共有多少的等式(即A有多少Row就知道了),如下例:
(EX3 begin)
\[ \sum_{i=1}^n \vec{f_i}+\vec{f_{ext}}=0\;\;\; (3 equas) \\ \sum_{i=1}^n (\vec{r_i} \times \vec{f_i}) + \vec{r_{ext}} \times \vec{f_{ext}}=0\;\;\; (3 equas) \]
所以,假如没有摩擦力的话,我们至少需要7个手指去抓取,去现成Form Closure。
感谢摩擦力的存在!
(EX3 end)
Grasps with Friction
摩擦力那么厉害,那我们现在就来考虑存在friction的抓取吧,也就是开始考虑Force Closure吧!
让我们从下面这个例子开始:
(EX1 begin)
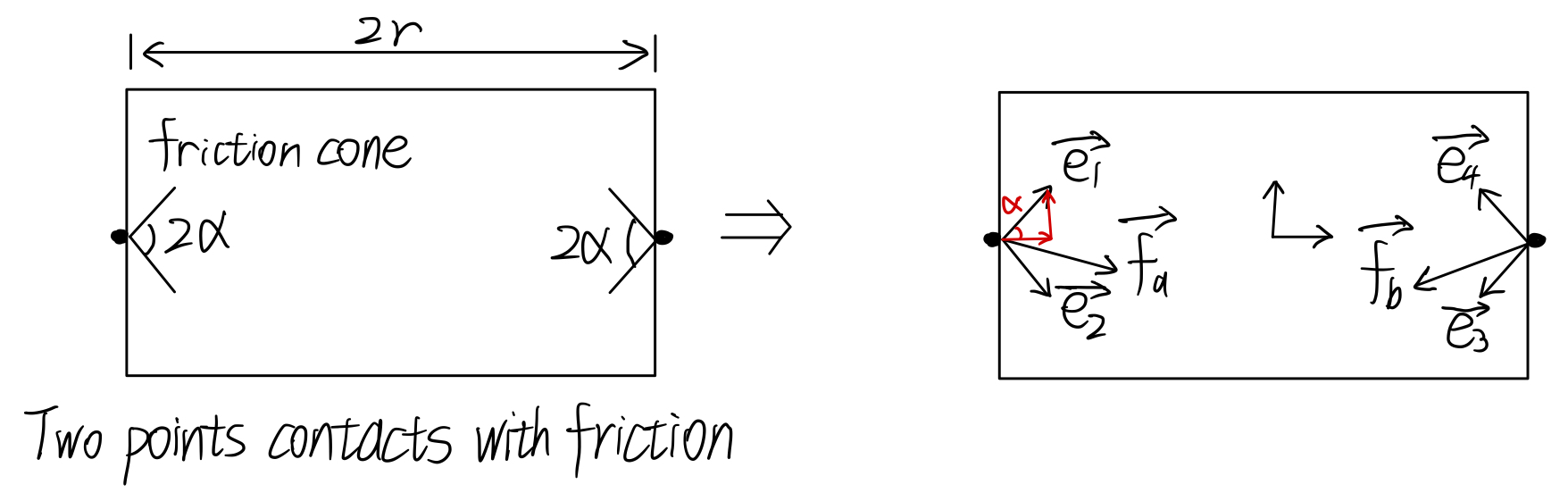
记得,手指施加的力的方向必须在Friction Cone之中,否则会发生滑动。
上图可得: \[ \vec{f_a}=x_1 \vec{e_1} + x_2 \vec{e_2} \\ \vec{f_a}=x_3 \vec{e_3} + x_4 \vec{e_4} \\ \vec{e_1}=\begin{bmatrix} 1 \\ \eta \end{bmatrix}, \vec{e_2}=\begin{bmatrix} 1 \\ -\eta \end{bmatrix}, \vec{e_3}=\begin{bmatrix} -1 \\ -\eta \end{bmatrix}, \vec{e_4}=\begin{bmatrix} -1 \\ \eta \end{bmatrix} \\ x_i \geq 0,\;\;\; you\;\; can\;\; only\;\; push \]
可得Static Equilibrium方程组: \[ \vec{f_a}+\vec{f_b}+\vec{f_ext}=0 \\ m_a + m_b + m_{ext}=0 \] 即: \[ \begin{bmatrix} 1 & 1 & -1 & -1 \\ \eta & -\eta & -\eta & \eta \\ -r \eta & r \eta & -r \eta & r \eta \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \\ x_3 \\ x_4 \end{bmatrix} = \begin{bmatrix} -f_{ext,x} \\ -f_{ext,y} \\ -m_{ext,z} \end{bmatrix} \]
那么,这里能否现成一个Force Closure呢?
也就是说,对于任意b而言,是否都存在一个x可行解呢?你画一下A的列向量围成的convex hull就知道了。这里是Force Closure。
(EX1 end)
其实,在现实中,friction就是存在的,而且我们考虑的一般都是Force Closure,那每次分析一个样例是否形成Force Closure都要去列Ax=b,然后画A的列空间,太麻烦了。
我们有一个更简单的方法来判断某个抓取是否形成Force Closure,即阮定理(Nguyen’s Theorem):
对于一个平面抓取而言,若抓取点只有两个,且是带有摩擦力的,则现成Force Closure的充分必要条件是:连接两个接触点的直线都在Friction Cone中。如下图:
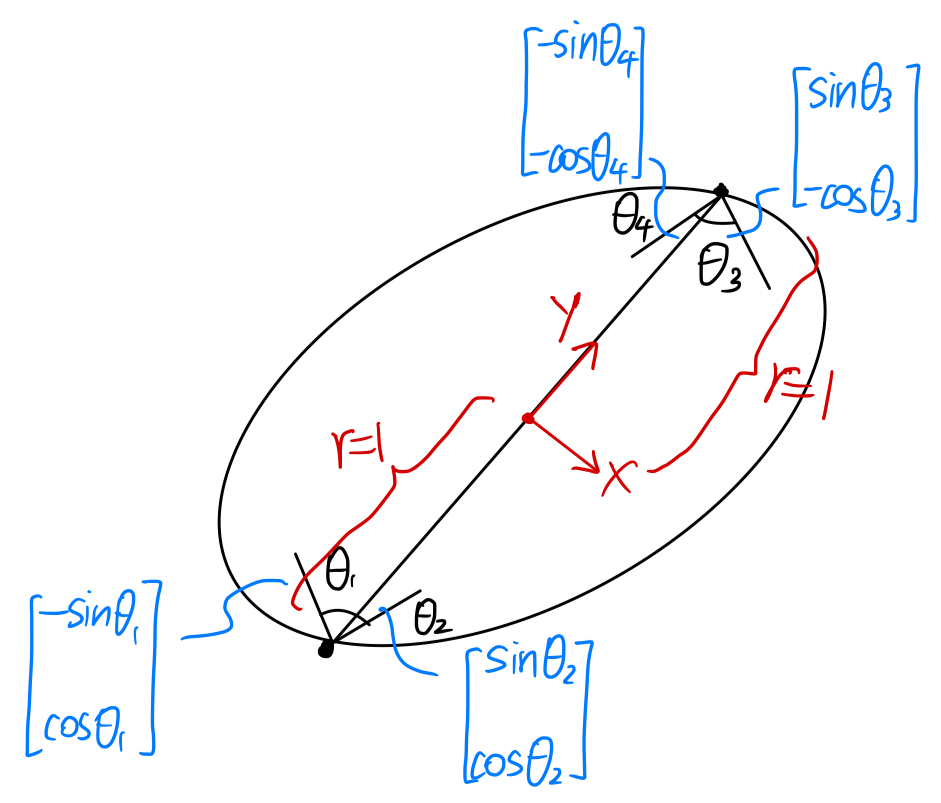
上图能形成Force Closure,下图则是形成不了Force Closure的负样例:
如何证明Nguyen’s Theorem?你可以列出它的Static Equilibrium方程组,对着上面的4个样例一个一个画A矩阵列空间验证一下: \[ \begin{bmatrix} -sin\theta_1 & sin\theta_2 & sin\theta_3 & -\theta_4 \\ cos\theta_1 & cos\theta_2 & -cos\theta_3 & -cos\theta_4 \\ -sin\theta_1 & sin\theta_2 & -sin\theta_3 & -sin\theta_4 \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \\ x_3 \\ x_4 \end{bmatrix} = \begin{bmatrix} -f_{ext,x} \\ -f_{ext,y} \\ -m_{ext,z} \end{bmatrix} \]